Here's the finalized code that contains an LCD screen, 2 potentiometers, and a button.
The LCD screen is having some problems but it should be fine by tomorrows presentation.
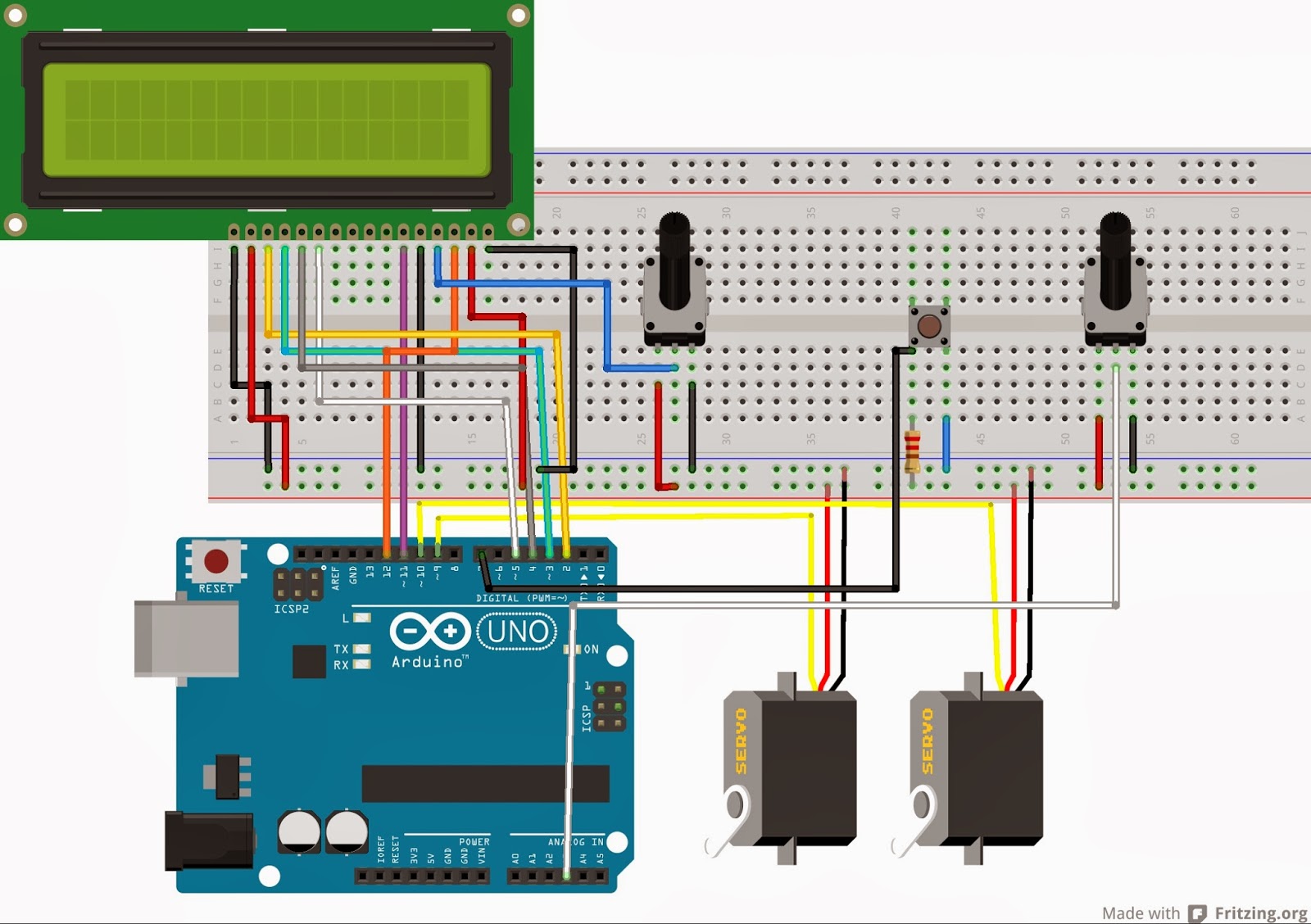
Here's the wire diagram setup.
This was created using the Fritzing program.
No comments:
Post a Comment